Oceanography experts are supporting a new generation of autonomous marine sensors collecting data that previously could only be collected from research ships using a much more manual process. The British Oceanographic Data Centre (BODC) has improved workflows to gather the required information accompanying scientific data (known as metadata) and strengthened how marine metadata moves between different systems.
The Platform Agnostic Metadata System (PAMS), is a tool used to create, view, and edit metadata describing marine platform deployments, such as Argo floats, autonomous long-range vehicles, gliders, moorings, and ships. This new tool helps share information about campaigns, deployments, platforms, sensors, calibrations, and events across these platforms.
Used by both data managers and engineers, PAMS provides a user-friendly interface over complex database structures, reducing manual effort, duplication, and the risk of human error. It also minimises reliance on manual email exchanges and repeated data entry.
Recent enhancements to the tool were primarily funded under the Future Marine Research Infrastructure (FMRI) Accelerating Adoption of Sensor Innovation (AASI) programme, a UK Research and Innovation (UKRI) Infrastructure Fund Preliminary Activity. A smaller part of the work, focused on calibration metadata, was funded through the Natural Environment Research Council (NERC) Environmental Data Service (EDS) National Capability.
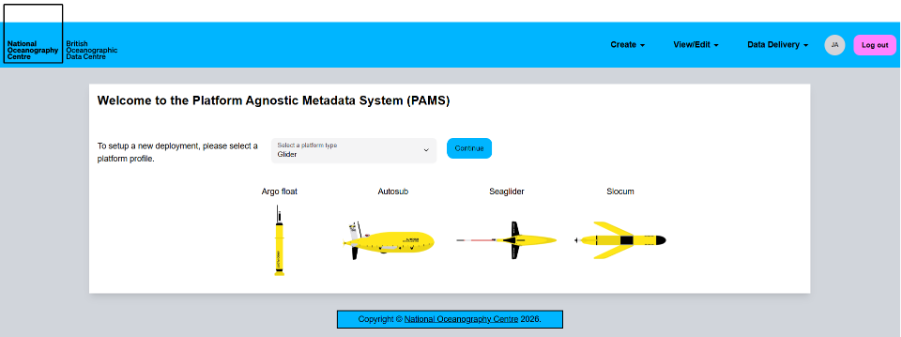
A screenshot of the Platform Agnostic Metadata System (PAMS) homepage
Supporting innovative marine sensors
The FMRI AASI programme is proving that innovative marine sensors, particularly low-power biogeochemical sensors which measure nutrients and chemicals in the ocean, can be rapidly translated into commissioned research capabilities. Many of these measurements were previously only practical from research ships, but advances in sensor miniaturisation are opening new opportunities for autonomous ocean observation.
As these technologies evolve, the digital infrastructure must also adapt to ensure the resulting datasets remain accessible, interoperable, and reusable. A major part of the work focused on extending PAMS to support FMRI AASI sensor metadata. Some sensors require additional deployment-specific configuration, namely parameter mapping, before they can be used operationally. This is necessary because sensor outputs are provided using generic manufacturer-defined variables that must be mapped to standardised parameters.
PAMS now supports this deployment-by-deployment parameter mapping directly through the application. For example, we are able to say that the “sci_generic_a” column in the data file corresponds to pressure (with the controlled vocabulary term ‘PRESPR01’), as in the image below. The source parameters are linked to internationally recognised controlled vocabularies through the NERC Vocabulary Server (NVS), helping ensure metadata remain interoperable, machine-readable, and consistent with wider community standards.
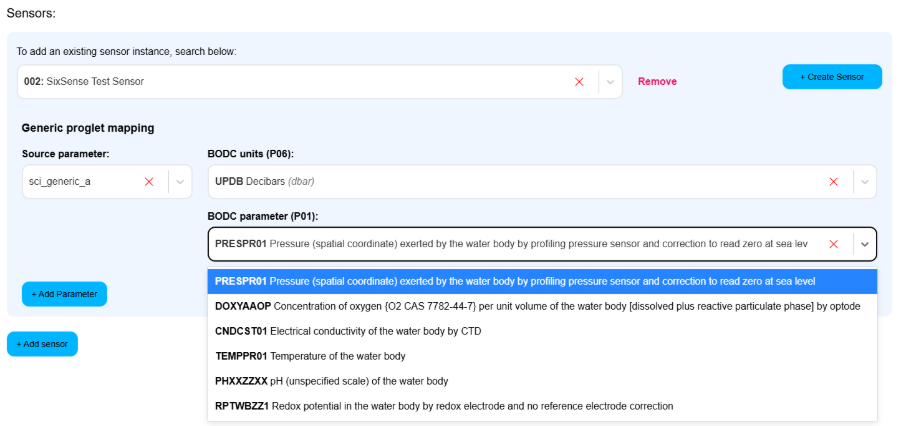
A screenshot of the Platform Agnostic Metadata System (PAMS) parameter mapping functionality
Usability improvements made alongside this new functionality have also enabled engineers to configure deployment metadata independently for the first time, reducing turnaround time and improving consistency. This has enabled Data Managers to transition towards more of an oversight and quality assurance role.
Capturing metadata directly within the application reduces the risk of information being lost or misunderstood during handover. It gives us confidence that the deployment details are accurate from the start.
- Glider engineer
Joining up metadata across the National Oceanography Centre
This work has also strengthened metadata integration across National Oceanography Centre (NOC) systems. Metadata exposed on application programming interface (API) endpoints hosted by PAMS now feed the Marine Autonomous and Robotics Systems (MARS) Metadata Service, which supports public-facing metadata and piloting applications. This removes duplication of effort, ensures consistent metadata are used across systems, and establishes BODC metadata as the central source of truth for autonomous platform campaigns and deployments.
The closer integration between the two systems has significantly reduced the amount of manual effort involved in managing metadata for deployments of autonomous sensing platforms. It has improved consistency between systems and made routine workflows noticeably more efficient. It's one of those improvements you don't really notice until you have to work without it
- Senior Software Engineer
Improving calibration metadata workflows
We have also improved how calibration metadata are captured and managed. Historically, calibration metadata have been received from manufacturers as PDF certificates, making it difficult to validate, utilise, or integrate into downstream systems.
Within the Argo programme, agreements are already in place with some manufacturers to provide calibration metadata in a standardised JSON format that can be validated against a schema before ingestion into a database. Building on the approach developed by the Argo community, existing Argo validation and ingestion tools were embedded directly into PAMS.
This allows users to upload and validate calibration details through a web interface, with validation issues presented visually rather than through command-line tooling.
The same approach has now been extended to support non-Argo sensors, including those used on gliders and ships. While equivalent manufacturer agreements are not yet established outside Argo, the supporting infrastructure is now in place to soon enable wider adoption of the same model. This drives multiple marine science communities towards a more consistent and interoperable approach for managing calibration metadata, using shared standards and vocabularies where possible.
Database structures were also designed to store calibration metadata in a machine-actionable form, allowing the information to be managed in a structured way, making it easier to both use and present calibration metadata.
Overall impact
These developments have made metadata capture faster, more consistent, and less reliant on manual workflows. They have also improved interoperability between internal systems and strengthened the foundations for future autonomous marine research infrastructure.
Using controlled vocabularies such as the NVS helps ensure metadata are standardised and reusable across platforms and applications. Structured calibration metadata also provides a stronger basis for future data quality workflows and richer metadata delivery to end users.
The system is now more flexible, efficient, and scalable, helping data experts support researchers with the growing complexity of autonomous marine science, while improving the quality and usability of the metadata, ensuring data are well described and easily accessible for users.
If you have any questions about this work, please contact us: data@nerc.ukri.org
References
Argo Metadata Validator https://github.com/euroargodev/argo-metadata-validator/
Argo Metadata Schemas https://github.com/euroargodev/sensor_metadata_json/
FMRI programme https://fmri.ac.uk/about